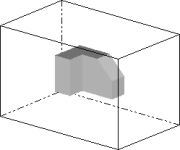
When the human eye looks at a scene, objects in the distance appear smaller than objects close by. Orthographic projection ignores this effect to allow the creation of to-scale drawings for construction and engineering.
Orthographic projections are a small set of transforms often used to show profile, detail or precise measurements of a three dimensional object. Common names for orthographic projections include plane, cross-section, bird's-eye, and elevation.
If the normal of the viewing plane (the camera direction) is parallel to one of the primary axes (which is the , , or axis), the mathematical transformation is as follows; To project the 3D point , , onto the 2D point , using an orthographic projection parallel to the y axis (profile view), the following equations can be used:
where the vector is an arbitrary scale factor, and is an arbitrary offset. These constants are optional, and can be used to properly align the viewport. Using matrix multiplication, the equations become:
.
While orthographically projected images represent the three dimensional nature of the object projected, they do not represent the object as it would be recorded photographically or perceived by a viewer observing it directly. In particular, parallel lengths at all points in an orthographically projected image are of the same scale regardless of whether they are far away or near to the virtual viewer. As a result, lengths near to the viewer are not foreshortened as they would be in a perspective projection.
Weak perspective projection[edit]
A "weak" perspective projection uses the same principles of an orthographic projection, but requires the scaling factor to be specified, thus ensuring that closer objects appear bigger in the projection, and vice versa. It can be seen as a hybrid between an orthographic and a perspective projection, and described either as a perspective projection with individual point depths replaced by an average constant depth , or simply as an orthographic projection plus a scaling.
The weak-perspective model thus approximates perspective projection while using a simpler model, similar to the pure (unscaled) orthographic perspective. It is a reasonable approximation when the depth of the object along the line of sight is small compared to the distance from the camera, and the field of view is small. With these conditions, it can be assumed that all points on a 3D object are at the same distance from the camera without significant errors in the projection (compared to the full perspective model).
Perspective projection[edit]
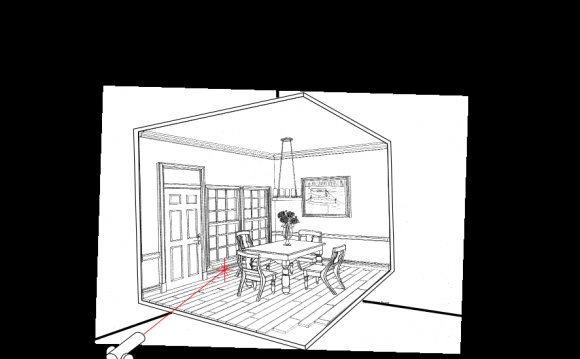
When the human eye views a scene, objects in the distance appear smaller than objects close by - this is known as perspective. While orthographic projection ignores this effect to allow accurate measurements, perspective projection shows distant objects as smaller to provide additional realism.
The perspective projection requires a more involved definition as compared to orthographic projections. A conceptual aid to understanding the mechanics of this projection is to imagine the 2D projection as though the object(s) are being viewed through a camera viewfinder. The camera's position, orientation, and field of view control the behavior of the projection transformation. The following variables are defined to describe this transformation:
- - the 3D position of a point that is to be projected.
- - the 3D position of a point representing the camera.
- - The orientation of the camera (represented by Tait–Bryan angles).
- - the viewer's position relative to the display surface which goes through point C representing the camera.
Which results in:
- - the 2D projection of .
When and the 3D vector is projected to the 2D vector .
Otherwise, to compute we first define a vector as the position of point with respect to a coordinate system defined by the camera, with origin in and rotated by with respect to the initial coordinate system. This is achieved by subtracting from and then applying a rotation by to the result. This transformation is often called a camera transform, and can be expressed as follows, expressing the rotation in terms of rotations about the x, y, and axes (these calculations assume that the axes are ordered as a left-handed system of axes):
texas higher education coordinating board blogging or vlogging blog best practices blog after breakup blogging routine blogging groups near me new mexico public education department quotes about early childhood education cherry till blog blogging about tv shows pa dept of education blogging your way blogging to the bank blogging as an educational tool bloating after ovulation difference between blogging and content writing education podcasts the education trust title ix of the education amendments act of 1972 prohibits: kelly education blog till the cat blogging in 2022 blogging like you mean it blogging income after 1 year blogging under pseudonym brown vs. board of education blog best practices kim kardashian educationRELATED VIDEO



RELATED FACTS
-
Orthographic projection (or orthogonal projection) is a means of representing a three-dimensional object in two dimensions. It is a form of parallel projection, where all the projection lines are orthogonal to the projection plane, resulting in every plane of the...
-
Werner Boy (May 4, 1879 − September 6, 1914) was a German mathematician. He was the discoverer and eponym of Boy's surface — a three dimensional projection of the real projective plane without singularities, the first of its kind. He discovered it in 1901 after his...
-
A zonohedron is a convex polyhedron where every face is a polygon with point symmetry or, equivalently, symmetry under rotations through 180°. Any zonohedron may equivalently be described as the Minkowski sum of a set of line segments in three-dimensional space, or...
Share this Post
latest post
-
 Hologram system July 26, 2026
Hologram system July 26, 2026 -
 CNN hologram technology July 16, 2026
CNN hologram technology July 16, 2026 -
 What is grating element? July 6, 2026
What is grating element? July 6, 2026 -
 Grating Spectrometers June 26, 2026
Grating Spectrometers June 26, 2026 -
 How to Make Holograms for Fake ID? June 16, 2026
How to Make Holograms for Fake ID? June 16, 2026 -
 Holographic Packaging June 6, 2026
Holographic Packaging June 6, 2026 -
 Holographic Pen May 27, 2026
Holographic Pen May 27, 2026 -
 Hologram image projector May 17, 2026
Hologram image projector May 17, 2026